[v2.0]
Here is the proposed <trigger> snippet to add to "step" One:
<triggers>
<trigger_zone name="boundries alert" rule="enter" fail_can_continue="1" group_id="" >
<trigger_rules>
<point lat="47.305233" long="11.311460" />
<point lat="47.402592" long="11.703875" />
<point lat="47.597572" long="12.112749" />
<point lat="47.507298" long="12.216961" />
<point lat="47.272873" long="11.644159" />
<point lat="47.234184" long="11.311676" />
</trigger_rules>
<event id="1" name="onEnter">
<msg repeat_msg="1" ><![CDATA[Remember to keep the plane path above the valley...]]></msg>
</event>
<event id="2" name="onLeave">
<msg repeat_msg="1" ><![CDATA[You left the desired path. Please return and fly over the valley path !!!]]></msg>
</event>
</trigger_zone>
</triggers>
Here is the proposed <trigger> snippet to add to "step" One:
<triggers>
<trigger_zone name="boundries alert" rule="enter" fail_can_continue="1" group_id="" >
<trigger_rules>
<point lat="47.305233" long="11.311460" />
<point lat="47.402592" long="11.703875" />
<point lat="47.597572" long="12.112749" />
<point lat="47.507298" long="12.216961" />
<point lat="47.272873" long="11.644159" />
<point lat="47.234184" long="11.311676" />
</trigger_rules>
<event id="1" name="onEnter">
<msg repeat_msg="1" ><![CDATA[Remember to keep the plane path above the valley...]]></msg>
</event>
<event id="2" name="onLeave">
<msg repeat_msg="1" ><![CDATA[You left the desired path. Please return and fly over the valley path !!!]]></msg>
</event>
</trigger_zone>
</triggers>
Solution Proposal for Exercise 1 - Area Guide
The first task is to create a guiding boundary that the simmer need to fly in. Failing to keep the plane in the boundary does not fail the mission.
Solution Proposed:
Here is a map that illustrates the new bounding area, and after it you can find a snippet solution for task one.
Solution Proposed:
- Create an trigger_zone in "step" One.
- The trigger_zone will have six points that will define the guiding area (remember to enter the points clockwise).
- The area type will be: "poly" and area rule will be "enter"
- Add two events, one for "onEnter" and one for "onLeave". For each event write a general message (<msg>) so the simmer will know where he is.
- The message should repeat every time we enter or leave the area, so we should flag the <msg> as repeatable.
- Test the mission
Here is a map that illustrates the new bounding area, and after it you can find a snippet solution for task one.
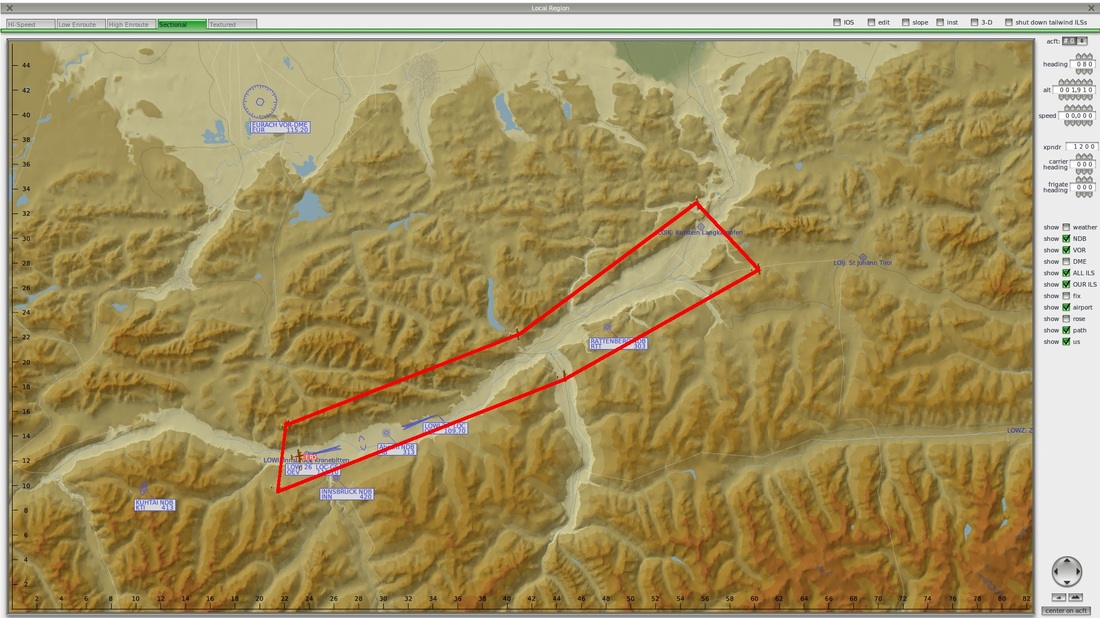
The red line represents the six points that bounds the "step" and forms the trigger_zone.
| Click on the link bellow to download the proposed solution for task 1. |
Proposal Solution for exercise 2 - Area Guide With Height Restriction Too
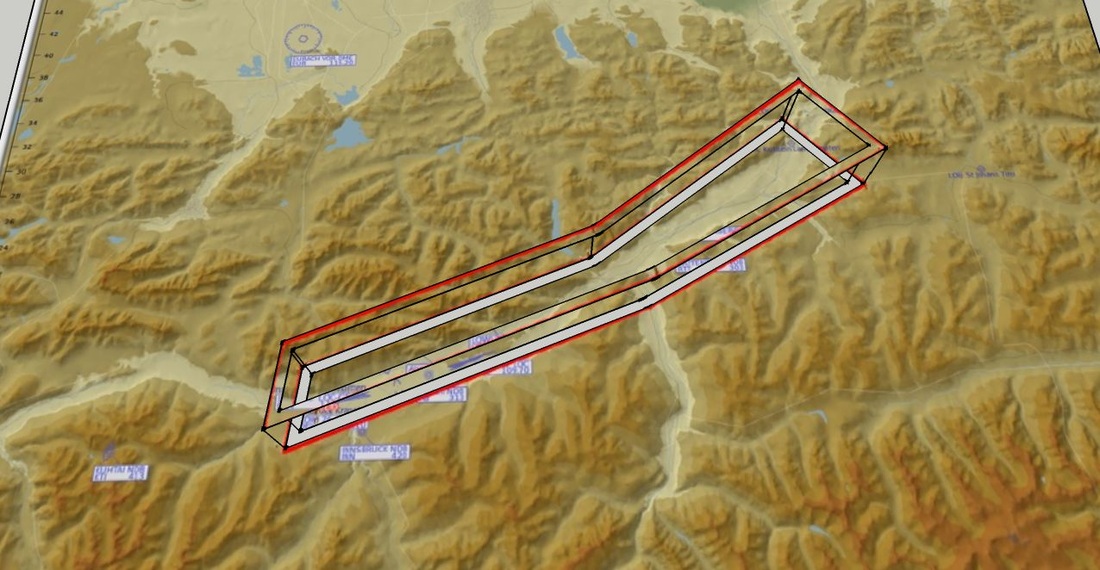
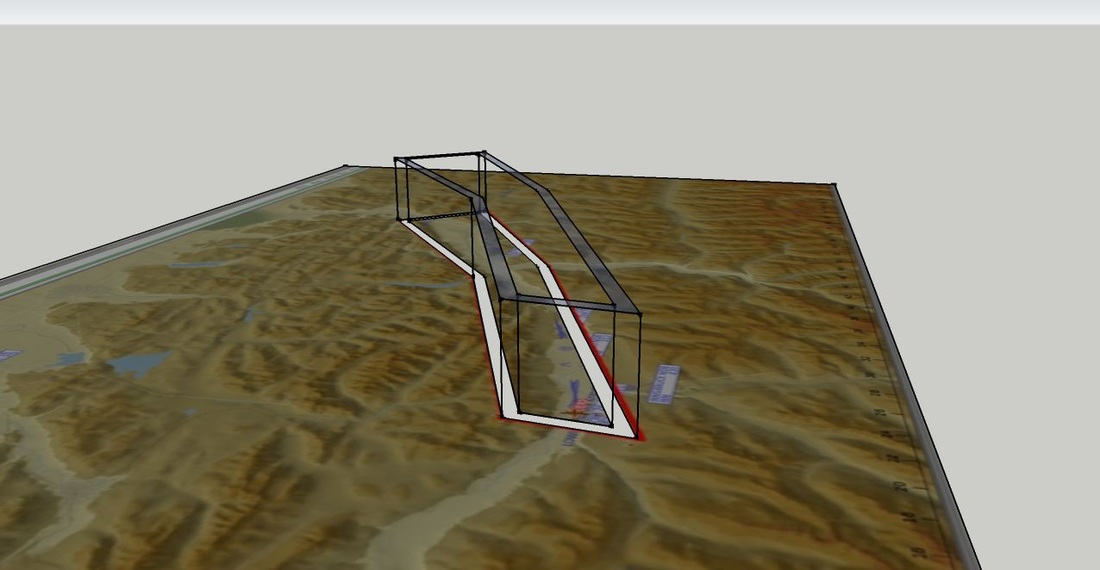
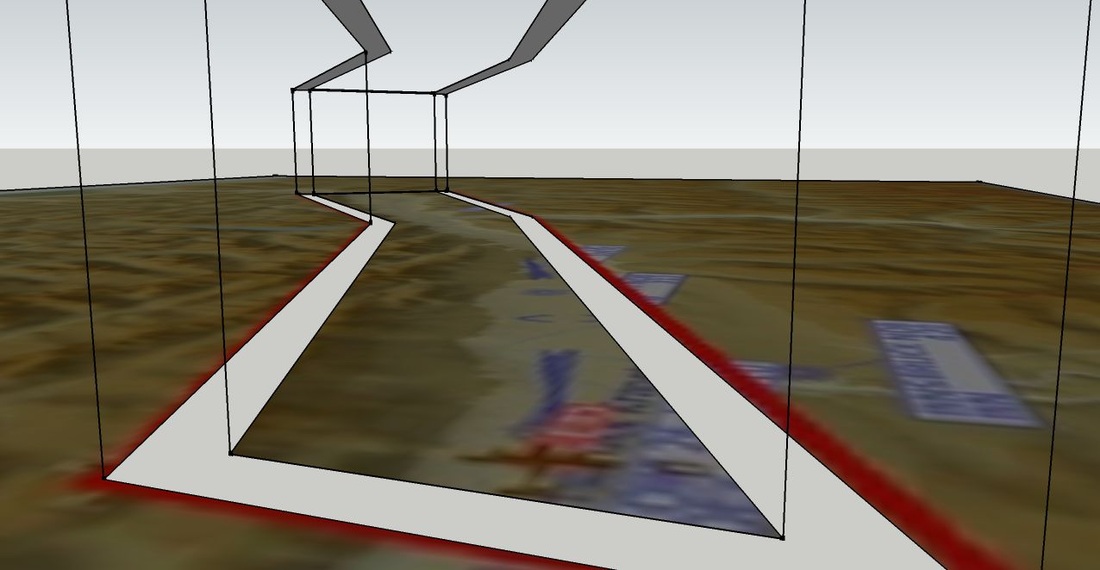
The second task is an extension of the first task. In both tasks we need a bounded area, the only difference is that the trigger_zone in task two, is restricted by elevation. We can vision the area as a three dimensional cube that the plane should fly in it.
Solution Steps:
Here is an image and a snippet that describes the suggested solution:
Solution Steps:
- Modify trigger_zone in "step" One.
- Modify both "elev_ft" and "elev_max_ft" to values "1.0" and "6000.0" respectively. Plugin will ignore elevation tests if one of these attributes is zero.
- Modify events "onEnter" and "onLeave" with messages that include the elevation restriction too.
- Test the modifications
Here is an image and a snippet that describes the suggested solution:
Here is the proposed <trigger> snippet to add to "step" One:
<triggers>
<trigger_zone name="boundries alert" rule="enter" fail_can_continue="1" group_id="" >
<trigger_rules>
<point lat="47.305233" long="11.311460" />
<point lat="47.402592" long="11.703875" />
<point lat="47.597572" long="12.112749" />
<point lat="47.507298" long="12.216961" />
<point lat="47.272873" long="11.644159" />
<point lat="47.234184" long="11.311676" />
<elev elev_ft="1" elev_max_ft="6000" restrict_elev="0" />
<!-- two other options to represent the volume boundaries. Read designer guide for more explanation. -->
<!-- elev elev_ft="6000" elev_max_ft="" include_zone="below" restrict_elev="0" / -->
<!-- elev elev_ft="" elev_max_ft="6000.0" include_zone="below" restrict_elev="0" / -->
</trigger_rules>
<event id="1" name="onEnter">
<msg repeat_msg="1" ><![CDATA[Remember to keep the plane path above the valley...]]></msg>
</event>
<event id="2" name="onLeave">
<msg repeat_msg="1" ><![CDATA[You left the desired path. Please return and fly over the valley path !!!]]></msg>
</event>
</trigger_zone>
</triggers>
<triggers>
<trigger_zone name="boundries alert" rule="enter" fail_can_continue="1" group_id="" >
<trigger_rules>
<point lat="47.305233" long="11.311460" />
<point lat="47.402592" long="11.703875" />
<point lat="47.597572" long="12.112749" />
<point lat="47.507298" long="12.216961" />
<point lat="47.272873" long="11.644159" />
<point lat="47.234184" long="11.311676" />
<elev elev_ft="1" elev_max_ft="6000" restrict_elev="0" />
<!-- two other options to represent the volume boundaries. Read designer guide for more explanation. -->
<!-- elev elev_ft="6000" elev_max_ft="" include_zone="below" restrict_elev="0" / -->
<!-- elev elev_ft="" elev_max_ft="6000.0" include_zone="below" restrict_elev="0" / -->
</trigger_rules>
<event id="1" name="onEnter">
<msg repeat_msg="1" ><![CDATA[Remember to keep the plane path above the valley...]]></msg>
</event>
<event id="2" name="onLeave">
<msg repeat_msg="1" ><![CDATA[You left the desired path. Please return and fly over the valley path !!!]]></msg>
</event>
</trigger_zone>
</triggers>
I highlighted the modified places in the "trigger_zone". Another thing to note, is that we do not abort mission if simmer did not abide to the restricting rules.
| Click on the link bellow to download the proposed solution for task 2. |
